
Robot di misurazione MR-5A


Una connessione intelligente del robot con sistemi di elaborazione delle immagini è la
strada per il futuro per garantire la qualità della produzione, ottimizzare processi ed
avere una reazione flessibile alle varie richieste di produzione.
I dispendiosi controlli manuali ripetitivi possono essere automatizzati e diventano in
questo modo più oggettivi e l'utilizzatore risparmia tempo e denaro.
Il sistema a prelevamento manuale OFF-LINE consente di effettuare controlli a campione
abbastanza vicini alla realtà di produzione.
Il robot di misurazione in modalità IN-LINE può eseguire controlli a campione in
automatico oppure al 100% in ciclo con la produzione.
Confrontato con stazioni di misura semplici con banchi di controllo con assi x/y, il robot
ha la flessibilità di poter ispezionare l'oggetto da controllare da angolazioni diverse.
In combinazione con un'elaborazione delle immagini appropriata si rilevano misurazioni
su figure complesse, si rilevano la completezza di particolari assemblati ed eventuali
difetti di superficie.
L'apparecchiatura viene equipaggiata nella versione base con un robot a 5-assi della
Mitsubishi che offre una flessibilità massima in spazi ridotti. A seconda delle esigenze si
possono utilizzare anche dei robot di altre marche ( ad esempio Scara).
L'alimentazione dei particolari, presa e posizionamento avviene con un sistema a
cassetto, matrici, assi lineari o altri sistemi di posizionamento. La scelta del tipo di
sistema di presa ( pinza o ventosa ) è in funzione del particolare da maneggiare.
Il software di misurazione e elaborazione d'immagine - CVS offre oltre ai tool di
misurazione per soluzioni 2D a scelta anche tutte le funzioni di comando del robot.
L'impiego del robot di misurazione è caratterizzato dai seguenti percorsi tipici di
controllo :
- Alimentazione degli oggetti da controllare
• manuale (modalità off-line)
• automatico (modalità in-line)
- Posizionamento degli oggetti da controllare
• Matrici specifiche per il particolare (il robot si muove cieco)
• Telecamere aggiuntive (il robot riceve delle coordinate di posizionamento)
- Presa degli oggetti da controllare
• Diversi tipi di presa come sistemi a pinze o ventose
• Stazioni opzionali di deposito per il cambio dei tipi di presa
- Misurare / controllare
• Misurazioni da diverse prospettive
• Controllo con sistemi di misura aggiuntivi come tamponi o laser
- Deposito degli oggetti da controllare
• Riposizionamento nella posizione di prelievo
• Divisione in buoni/non buoni e deposito in apposite posizioni
In alternativa si possono movimentare i mezzi di controllo (telecamere, tamponi, laser)
mediante il robot lasciando fermo l'oggetto da controllare.
MR-5A OFF-LINE
Alimentazione manuale mediante cassetti con matrici specifiche per oggetto da
controllare
Dati tecnici :
Larghezza: 1.200 mm
Profondità: 1.400 mm
Altezza: 1.900 mm
Alimentazione: 230 V / 50 Hz / 10 A
Pressione aria: 8 bar
Peso: ca. 600 kg (dipende dal equipaggiamento)
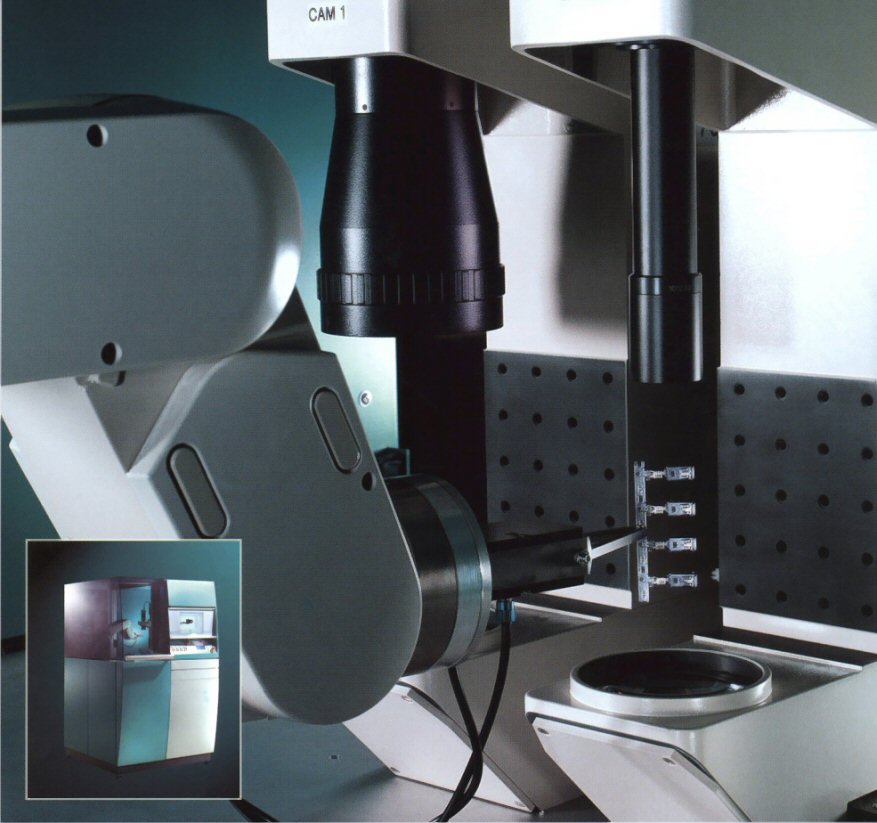
• Robot a 5-assi con pinze e ventose
• Misurazione con due moduli di telecamere
• Sistema a cassetto per l'alimentazione manuale
• Lettore a codici a barre per il cambio automatico del programma di controllo
• Tempo di misurazione per 10 Posizioni < 20 s
MR-5A IN-LINE
Alimentazione automatica con due stazioni di posizionamento pneumatiche
Dati tecnici
Larghezza: 1.200 / 1.550 mm
Profondità: 1.400 mm
Altezza: 1.900 mm
Alimentazione: 230 V / 50 Hz / 10 A
Pressione aria: 8 bar
Peso: ca. 650 kg (dipende dall'equipaggiamento)
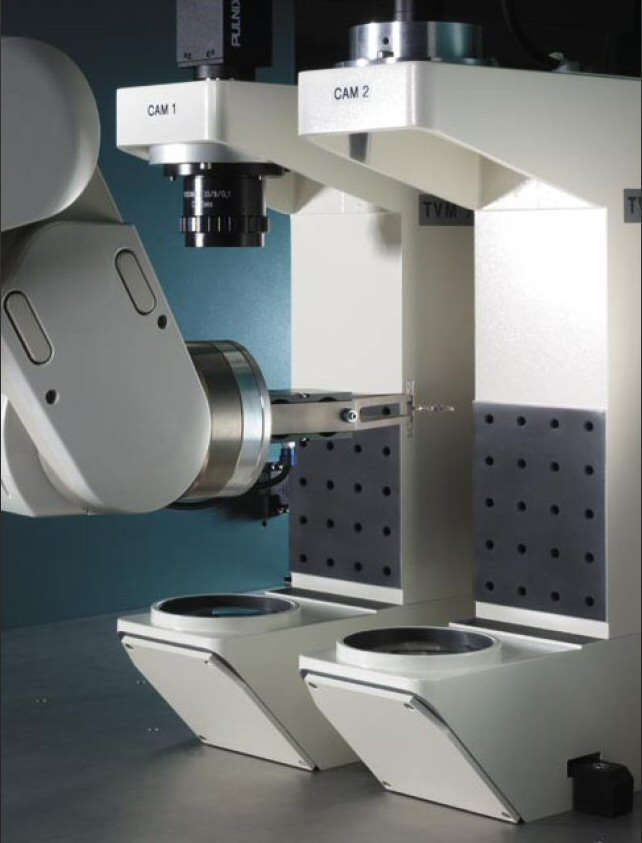
• Robot a 5-assi con pinza di presa
• Misurazione con due moduli di telecamere
• Controllo di superfici con telecamere mobili come "pinze intercambiabili"
• Sensore laser aggiuntivo per la misurazione di zone di luce (es. avvallamenti)
• Interfaccia alla macchina di produzione (TCP/IP, ProfiBus, ProfiNet)